Through advanced 3D Reconstruction Technology, 3DF Zephyr can create 3D model from photos. Learn more about this advanced photogrammetry tool.
3Dflow is a technology company in the field of Computer Vision and Image Processing. It was established as a spinoff of the University of Verona in 2011 and recognized as a spinoff of the University of Udine in 2012. As an academic spinoff, 3Dflow is constantly pushing on research and development. Its operative headquarter is located inside the Computer Science Park in the department of Computer Science of the University of Verona.
3DF Zephyr is 3Dflow’s flagship product. 3DF Zephyr allows to automatically reconstruct image to 3D model. It builds on top of 3Dflow’s proprietary, cutting-edge, reconstruction technology. It comes with a user-friendly interface and the possibility to export in many common 3D formats or even to generate lossless video without the need of external tools. The software is used in many different fields such as:
- UAV and Aerial Mapping
- Architectural modeling
- Close Range Photogrammetry
- Archeology
- Vehicle Collision Analysis
- Innovative commerce and marketing solutions
- 3D
- VFX
Starting from version 3.0 Zephyr also supports the registration and management of 3D data coming from laser scan. Learn all about how to create a 3D model from photos.
The technical interview is given by Roberto Toldo, Technical Director and co-founder of 3Dflow.
Dear Roberto, how you came up with an idea of 3D model from photos?
We jointly founded 3Dflow with Prof. Andrea Fusiello and Simone Fantoni back in 2011.
During that time, I was finishing my Ph.D. in Computer Vision with Prof. Fusiello. Simone and I did not want to pursue an academic career. So, we decided to challenge ourselves with a commercial project and here we are! All of us were researchers in the fields of Computer Vision and 3D reconstruction, but we wanted to try to step-up and bring the technology we pioneered into the commercial market.
“3D from photos” algorithms were part of our daily routine at the University but running a company is a completely different story. Starting 3Dflow from scratch, with zero business experience was quite difficult at the beginning, but also very satisfying in the end.
Let our readers know about in-depth details of your proprietary software – 3DF Zephyr.
The first version of 3DF Zephyr was released about 4 years ago. At the very beginning, Zephyr was a simple“3D from photos” software. The core technology has evolved a lot since the first releases, it is a continuous improvement process. Zephyr is 100% internally designed and architectured, each year we add many new features while maintaining a user friendly interface.
Over the years, Zephyr has evolved to become one the most complete and accurate solutions for creating 3D models from photos and for managing 3D scan data coming from different sources.
How 3DF Zephyr is different in peer competition of Photogrammetry and Laser scanning softwares?
I think Zephyr is indeed one of the most complete, versatile and accurate photogrammetry software in the market. Additionally, we enjoy listening to our community and to our customers. Most of the developments has been driven by their feedback. From the technology side, we pay particular attention to accuracy. We also give users the total control over our reconstruction engine. Unlike most commercial software, we fully expose every parameter and we give the complete control to the users.
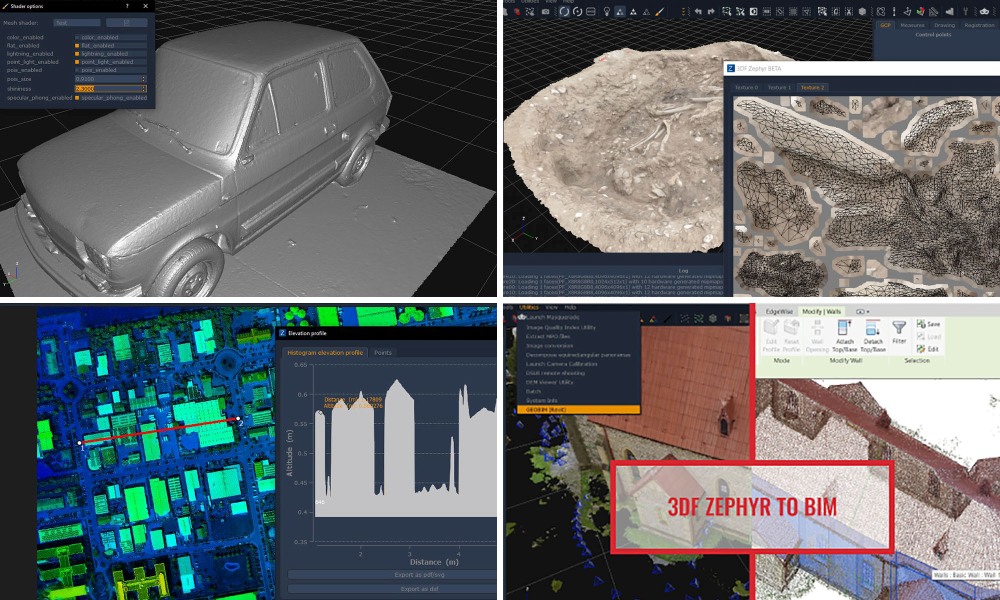
Zephyr is also the first software to include a complete photogrammetry solution with full management of any laser scan data, both colored or not and pre-aligned or not. Zephyr is a complete tool. You can edit and manage 3D content, apply a variety of filters as well as other things, like drawing CAD polylines, extract level curves and sections, compute volumes and other measurements from your data. It is much more than just to create a 3D model from photos.
What were the major challenges during development of 3DF Zephyr and how you cracked it?
Building, maintaining and evolving a very complex software like Zephyr is certainly difficult. I would say that we have had to tackle two major challenges.
The first one is from the company side. Since we bootstrapped the company with no investors, we had to develop Zephyr while doing external consultancy projects. Its not easy to start a company without investors, but we like to be fully independent and I think this reflects positively also on our approach with the community and our users.
The second challenge is the Zephyr architecture. Building a software is a bit like building a house; you cannot prepare the basement to build a shack and then decide to build Castle. It was really challenging to evolve the architecture with the growing complexity. I think we nailed it as we paid a lot of attention to modularity and to a well-designed software architecture.
It is a very difficult process to automatic creation of image to 3D model. We may have lost more time at the beginning of the project, but we are now seeing the advantages.
Please share roles and responsibilities of 3Dflow’s core R&D team.
Simone and I are the Technical Directors and we supervise all the core technology development. We were both Computer Vision researchers at Verona University before founding 3Dflow. We are a relatively small development team. The beauty of our development team is that we have complementary skills and we get on very well!
We have divided up the core architecture of the pipeline into major logical blocks and each of the technical directors have primary ownership of the said block. However, given the significant overlap in technical capability, we are able to take on and support each other rapidly.
Yash Singh joined 3Dflow in 2014 as CEO and has since been on the board. He is primarily in charge of business development.

How was the response of this unique 3D reconstruction software?
I would be lying if I said that it has been a huge success from the first release 4 years ago. Instead, it has been a continuous growth. The user-base expanded a lot especially in the last couple of years and we are very happy to have reached and to being appreciated in very different markets and regions. It got recognized much more than a tool which creates 3D model from photos. This year we also translated the software in Japanese and Chinese languages.
The unique way we deal with laser scan and photogrammetry together, has also opened new markets and completely new possible workflows for professional surveyors. It can work on complex objects, from sculptures to very fine designing. Even the everyday things can be 3D modeled via this photogrammetry tool. You can try such things like where to buy straw bales near me and work on it.
How many 3D softwares and equipments are supported? Also share data import export pipeline.
We like to support as many as input and output formats as possible. We want an artist to use our software with other software seamlessly. The list of supported format is huge. Zephyr accepts almost any photo format (including raw) and it can process video streams.
In input, we natively support laser scan format from Faro, Z+F, Riegl and DotProduct and all the most common point cloud formats (e57, las, ptx, xyz) and mesh formats.
In output, we support a variety of point cloud formats (ply, pts, ptx, xyz, txt, las and e57), mesh formats (ply, stl, obj, fbx, pdf3d, u3d and collada), geotiff orthophotos, video animation exports and CAD formats for polylines (dxf, shp). We are very open and you can use our software in conjunction with almost every other 3D modeling / CAD / GIS / BIM software. We also support custom UV maps that can be imported before texture generation and after having edited the mesh with external modeling software and we can export texture maps in 8, 16 and even 32 bits formats.
What should be the ideal hardware setup to fully utilize powers of 3DF Zephyr?
Zephyr is quite demanding. The first suggestion is to have a good latest generation CPU plus one or more NVIDIA GPUs. Zephyr takes advantage of CUDA technology and is able to use multiple heterogeneous CUDA GPUs, if available. Zephyr works fine on older machines and ones without NVIDIA GPUs, but the reconstruction running times will be considerably slower. Additionally, an SSD drive will reduce the processing as well. The amount of RAM needed depends on the size of your projects. Most reconstructions (under 1000 photos) and scans can be done on a workstation with 32 GB of RAM, if you are dealing larger projects, you will certainly need more.
Finally, we recently introduced a small benchmark utility inside 3DF Zephyr. Users can anonymously publish their results here: http://benchmark.3dflow.net. We believe this will be especially useful for people looking for hardware suggestions.
Kindly share details of your backbone technologies (Samantha, Stasia and all others).
Samantha is our leading Structure and Motion (hence SAM) pipeline. Starting from photos, it automatically extracts the cameras internal and external parameters (the motion) along with a sparse point cloud reconstruction of the scene. It works with any input thanks to our unique auto calibration routine.
Stasia is our Multiview stereo technology. Starting from the Samantha output, it produces a dense point cloud from image matching. The computation of the depth maps is linear in time.
Sasha is our sharp mesh reconstruction engine and it includes a photo consistency based mesh optimization that is able to extract the fine details in the mesh.
Tessa is our texture algorithm. It embeds an innovative color balance procedure that minimizes changes in illumination.
How one can use your SDK?
To use our SDK, simply send a request through the related form on our website.
The SDK is an option reserved for companies and studios rather than for end users. Prices and licensing of the SDK are discussed on a case-by-case basis and depends on its usage. The SDK can be used to integrate our technology with specific workflows or products. The technology is the very same used in Zephyr and the SDK is composed by Windows 64 bit precompiled dynamic libraries.
Please share projects of your clients.
Our technology is very versatile and the software has been used in a lot of very different scenarios and applications of image to 3D model creation. Initially started as to create automatic 3D model from photos, now it has found various new avenues. I must be honest and say that we did not foresee the range of applications for which our customers are now using our software. While Zephyr is used for classic 3D surveys (e.g. unmanned aerial vehicle – uav, urban) or 3D modeling application (e.g. small objects, body scans or interiors), I would like instead to present here some peculiar examples of 3DF Zephyr.
Zephyr technology can be used to reconstruct large scale environments. Recently, Scott Nebeker literally modeled an entire mountain from airplane photos. You can find a video of the ‘making of’ here:
From the high mountains, lets go down to the depth of dark underwater. Jerry Eliason is a shipwreck hunter, who models Shipwrecks situated very deep underwater where no natural light is present. This is the case of the HESPER shipwreck in Lake Superior.

And not just big or normal scale, photogrammetry can be successfully used in close up and macro photography as well. Dr. David Woodward and his team are successfully employing Zephyr for road surface analysis. For example, they are interested in analyzing the interaction between the tyre rubber and small particles lying on the road surface.

These are completely different examples of scientific and professional applications. However, I would find interesting to use the same acquisition techniques for other kind of applications, including Virtual reality and 3D modeling.
What are your future plans?
Our plan is to continue to improve 3D Zephyr and its technology. We are very passionate for this technology of image to 3D model.
Currently we are working on a new release that we will be between the end of January and mid of February. We will add multi-texture support (both input and output) and multi-spectral support. The possibility to generate and manage multiple textures in a single mesh is a feature very requested in the VFX industry, while multispectral images are the future of precision agriculture.
The strength of our software is that it is complete and versatility. We also listen to our community a lot to drive the development and we want to continue like that.
We thanks Roberto Toldo again. Wishing entire team of 3Dflow for continuous growth and success. They all have shown an excellent way regarding how to create a 3D model from photos.